hi. i need assistance for making to run an servo motor (futaba S3003)
i also buy,for this motor a Micro Serial Servo Motor Controller from "pololu "
see here the controller itself : oceancontrols.com.au/motor_c … o_0207.htm
i buy also an CI MAX 232 for redistributing the voltage (from port COM1 =12V/-12V to controller=who need 5V !!! ).
i have Visual Show Automation (VSA) software with i can test the motor.
with all of this i cant make it run.
i need help, please ,i am hopeless.
anybody who manage to build the devil and can give me some close advice?
by the way i want to make a robot
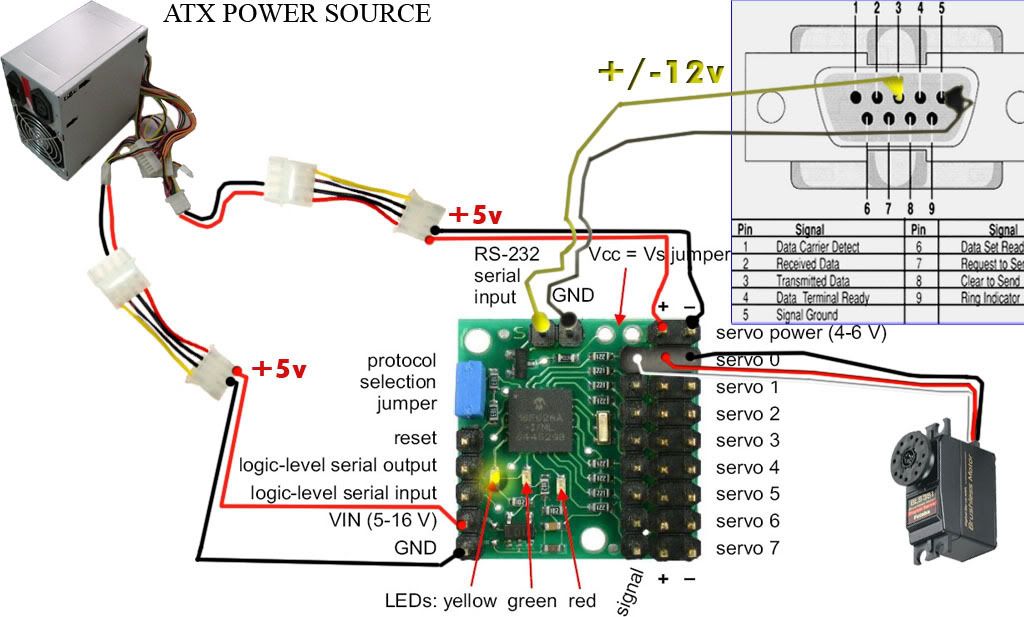
It sounds like you have everything you need. Actually, you don’t need the MAX 232 level converter. If you look at the picture below, you can connect the TX line (pin 3) form an RS-232 serial port directly to the RS-232 serial input pin on the serial servo controller, and the ground line (pin 5) from the RS-232 serial port to the [i]GND[,i] pin on the servo controller.
Can you describe your setup in more detail? Specifically the wiring, and power sources. Also, what exactly are you dong in VSA to try to move the servo? Do you get any activity at all (even blinking LEDs)?
Wow, great pictures! I wish everyone started their troubleshooting questions with pictures like those!
It looks like your wiring is all correct, and like you’re doing the right things in VSA. I can’t completely verify that last part since my servo controllers are all at work at the moment, but it looks like youre hitting all the right buttons. I just noticed that my home computer doesn’t currently have real com ports any more (sad!) but with a little virtual serial port emulation, it looks like VSA is sending out the correct serial bytes for MiniSSC-II mode (Once you get this figured out, VSA also supports Pololu mode, but first things first…).
The yellow LED should go out when the first serial byte is received, and the green led should blink with every correctly formatted byte received. The fact that the yellow LED is staying on means that your servo controller isn’t receiving a thing (not even a garbled, incorrectly formatted byte). You clearly have your VSA devices configured for port COM1, so I have two guesses:
Whatever port you have the controller plugged into is not COM1:
Is it a physical port on your computer, or some sort of USB to Serial adapter? Have you tried setting VSA to use any other com ports installed on your comptuer? If you physically connect pins 2 and 3 and send bytes out COM1 using a terminal program, do you see the characters you type coming back (called a loop-back test).
You’re using a null-modem or other non-standard serial cable:
Are you plugging right into the port on the back of your computer, or using a serial extension cable? Some serial cables (null-modem cables) have pins 2 and 3 crossed, so that you can connect two RS-232 devices to each other. That way TX of device A is connected to RX of device B and vice versa. You can check your cable with a continuity tester, or just go ahead and try connecting the RS-232 serial input pin of your servo controller to pin 2 of the end of your serial cable.
-Adam
P.S. I’m 95% sure you’re doing everything right in VSA, but the next time I stop by my office I’ll try running a Pololu servo controller with it and let you know for sure that that’s not the problem.
for your first presumption :
-Is it a physical port on your computer, or some sort of USB to Serial adapter?
no,im Not using adapters. i wire it straight to pins of a free socket who is connected IN the port com1.
-Have you tried setting VSA to use any other com ports installed on your comptuer?
yes; no shiver.
If you physically connect pins 2 and 3 and send bytes out COM1 using a terminal program, do you see the characters you type coming back (called a loop-back test)?
this is a trick one. i will test it but im a bit afraid of burning something. and second, i dont have a display at what i can see the “loop-back thing”. but i will try it. seem it is the singular mode to bust it down. i hope.
for your second presumption :
-Are you plugging right into the port on the back of your computer, or using a serial extension cable?
like i wrote before, i use a free socket ,with 2 wire about 2meters each.
i don’t use serial cable.
and for your PS
im not even 20% sure i am doing all right in VSA becouse this is my first encounter with this kind of serial stuff , i am at the begining of understanding them (f. rookie) and i do it to the eye, presuming im doing right.
im have much skill at parallel stuff where is very intuitive in some cases
i play with VSA and i managed to send data to LPT (parallel port) on custom at desire pins and fv.
the software is good , no doubt.
i have already , from my previews experiments, pluged in some LED-s on each pin send data parallel port (from 1-9=8pins to send information). and i test-it with those.
now the real question is:
how can i manage to verify if that com1 is on or off ?
logically will be with a led but appear that baud rate mess up the blinking led.
i just want to see if is some signal send out there physical-real.
…
i recheck the wire and all is alright. i see when i touch with my finger (or checking aparatus) pin3 the controller change status in blinky leds(red on,green blink) but when(after restart) i insert it in com1 and try to transmit data , no activity.
i remember when i worked with LPT port that i was needed a some sort of driver for open some stuff from windows to manage working with //port.
it’s about “UserPort.sys” to have put it by hand in Windows-system32.
otherwise all i send it to LPT port did not worked (i know i try-it with pascal and c++). i suppose for serial is the same problem?
i use XP SP2,and have framework and all drivers updated. i checked the driver for serial itself and it appear ok (device manager), it is installed alright.
i bet thats is the cause. some specific stuff "driver"sh… .
my bad after all. i manage ,huh, to make light in this case.
my bloody f… son of transistor b…ach com1 was burned already.
i tested at another computer and it worked at 2400 baud rate only ; why 2400?
and i put pololu mode in VSA.
thanks for your trouble and thank you very much for your support , and i mean it. you dont know but you help-me enough only responded to my problem. you are the gold people. i am in gratitude.
good luck guys.
PS. the servo itself is too warm for running just about 2-3 min. what is your recomandation? 5V is to much for him?
Glad you figured it out, although I’m sorry your com port is busted.
MiniSSC-II mode only works at 2400 or 9600 bps, but Pololu mode should work at any baud rate from 2000 to 40000 bps. The servo controller should auto-detect the baud rate of the first character it receives after being turned on, so once you have sent a command to the servo controller at one baud rate, it won’t recognize commands sent at other baud rates until you reset it.
As for the servo, Futaba is a good brand, and should run just fine on 5V to 6V. It’s normal for the servo to get warm to the touch, but it shouldn’t be getting hot unless it is working very hard, like lifting a heavy weight, or pressing against something it cannot move (which, of course, is not good for the servo). Warm is ok, but If your servo is getting hot at 5V just turning free in air there may be something wrong with that particular servo.




{kind=link}
{kind=link}