
Hi to every one
i am quite interested in building a robot and i am curious to know if a simple radio transmission can be plugged on a servo controller via the RS232 port ? a kind of radio rs232 ?? does it exit ??
thank you for your replies
Things like you’re describing were a lot more expensive when you wrote this post (I hope you’re still watching it) but recently I discovered these little gems:
http://www.maxstream.net/products/xbee/xbee-oem-rf-module-zigbee.php
http://www.maxstream.net/products/xbee/xbee-pro-oem-rf-module-zigbee.php
A more detailed data sheet is available from digikey:
http://www.maxstream.net/products/xbee/product-manual_XBee_OEM_RF-Modules.pdf
They’re basically wireless serial modems. Think of cutting the serial cable between your computer and the robot you are controlling with it, then wiring each end to one of these. The xbee ($19 each) has a 300 foot ideal range, and the xbee-pro ($32 each) has a 1 mile ideal range. Obviously you will need two to communicate. They use CMOS logic, which I think is just normal logic level serial data (please correct me if I’m wrong). I am planning on using two xbee-pro modules as a bridge between a Pololu USB to Serial Adapter and several Pololu serial controllers to make a mobile robot arm I can control from my computer. One pain is that the pins are at a 2 mm spacing, instead of the standard 2.54 mm (0.1 in) spacing. I think they just want you to buy their serial or USB adapters, but many places sell 2mm header receptacles!
Maxstream will try to sell you lots of extra bits and a development kit, which costs a whole lot and you only really need to do advanced programming of the transceivers (frequency and power changes, etc). You can get just the bare units directly from Maxstream, with your choice of a chip antenna, short wire-antenna, or a connector for separate antennas, which they also sell. My lab used a set of the xbee-pro transceivers with wire antennas to make one of our robots wireless. We did get the development kit in case we ever need to run multiple wireless robots at the same time, but the units communicated with each other right out of the box. I’m going to use the panel-mount external antennas, because they are cooler and I imagine they give you greater range.
I don’t know if the pro and the standard modules will communicate with each other out of the box, but that would save a little money if you wanted the longer range, but did not need to get information back from the robot. I will ask about this when I get mine (after I scrape together the money for them) but I think I’m going to get two of the pro modules, in case I want to add feedback sensors to my robot later.
It’s been a year, and I’ve switched over to working with the LPRS Easy Radio modules. Same principal as the Xbee’s, but much more user friendly and easier to configure (with serial commands, no special hardware)!
They’re made in England, but there is a 900 MHz version for use in the US. The modules also come pre-loaded onto RS-232 or USB evaluation boards, although I don’t see the USB board offered online right now (don’t bother with the overpriced evaluation kit!).
-Adam
Robotshop.ca still carries the USB breakout board of the LPRS easy radio transceiver, but it’s a bit pricey.
-Adam
this is like one of those really slow moving threads that evolves ever so slowly over the course of time…
I’m looking at integrating wireless comms into a project I’m working on and am thinking about a couple of technologies I’ve run into and would be interested if anyone has experimented with any of them.
personally, I think I’ve eliminated the proprietary radio signal base comms units mainly due to the wide availability of standards based technologies. So its kind of one of those why reinvent the wheel the things.
The technologies I’m currently thinking of useing are zigbee via the xbee modules which have already been mentioned, bluetooth or wireless ethernet (802.11b/g).
As for the specific technologies it woul d be the xbee’s probably along with the sparkfun breakout boards (sparkfun.com/commerce/produc … ts_id=8276)
for the bluetooth. I’m either leaning toward using the blue smirf module or a tethered wiimote. The wiimote is a really interesting option as it provides both bluetooth but also a 3-axis accelerometer. I’ve messed with the 3-axis accelerometer on a wii nunchuk device which was surprisingly easy to get working as there are lots of examples and code snippets already available on the internet. One good source of information is on wiili (wiili.org/Wiimote) but there are several such sources in addition to examples of connecting wiimotes or nunchuk’s to arduino boards which are atmega168 based.
Lastly is wireless internet ethernet. This has always been an attactive option but has been generally too expensibe (for me) as an option. But I’ve run into the MatchPort b/g from lantronix which brings the price in at the upper end of acceptablility. The matchport provides a serial to wireless ethernet bridge. What I think i’d prefer is a CAN to wifi bridge - or even just a CAN to ethernet bridge. Such things exist but they are priced way out of the range of feasibility. Anyway, more info can be found on the lantronix website (lantronix.com/device-network … hport.html)
I’d be interested in hearing other ideas and or experience with any of these.
Thanks,
Lee
Adam,
Would the Easy Radio transmitter/receiver be a good, reliable option for sending data to the Pololu micro serial servo controller board from the TX pin of an Arduino? It looks like this would be an easier option vs. the Zigbee or BT.
Phil
Actually yeah, it should work great. You wouldn’t have a way to reset the servo controller if your commands got scrambled and the servo controller went into blinking red light mode, but these radios have very good error checking and are much more likely to just drop a packet than to let the wrong one through.
I also see you noticed you can save some money by getting the transmitter & receiver pair, since you only need one way transmission. Active Robots makes nice interface boards, but I bet you could find a more local distributor of just the modules (unless you’re in the UK?).
Are you thinking of keeping the Arduino on the ground then? I actually have a pair of the 900MHz transceivers doing communication between a desktop computer and a quadrotor helicopter I’m trying to automate. I’ve never tested the max line of sight range, but I regularly get rock solid two way communication at about 10 meters through two walls.
-Adam
I’ve updated my profile to show I’m in Austin, TX.
The only North American distributor I found was in Canada and they were only selling the more expensive transceivers.
The panobot will only be used on the ground and I was going to add a remote to active the Arduino program and then I thought it would be just as easy to make the Arduino the remote. Using the micro servo controller board will make this easy. I’ll order the set this weekend.
I’ve been wanting to ask you about your quadrotor. Is it flying? I’ve been watching others build them on RCGroups.com. I’m interested in the altitude and GPS position hold that a few guys have achieved. They are very cool.
Phil

The “Omnicopter” as we’ve started calling it currently flies on a test 5dof test stand, with roll, pitch, and yaw under computer control, and me controlling the throttle. I’m hoping to get throttle under computer control next week, and once I have everything tuned up we can let it off the stand and see what happens!
-Adam
Adam,
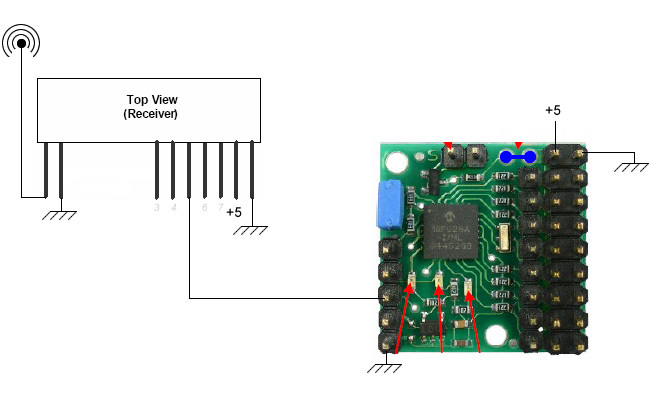
Is this correct for connecting the Easy Radio RX to the Pololu servo controller and will the 3.3 volt signal from the rx work or does it need to be 5v?
Thanks,
Phil
P.S. Is the Omnicopter throttle under computer control now? I was just reading how holding altitude during a wind gust can be challenging.
Yeah, you’ve got the wiring right (assuming everything is connected to the same ground).
I completely forgot that the radio was a 3.3V device in a sneaky, 5v input golden package. I have mine connected to a Baby Orangutan, and the AVR microcontrollers have much more forgiving digital cutoff voltages than the PICs used in the servo controllers. The short answer is try it and see (check out this thread for some background). My guess is it will work just fine, but if it doesn’t work there are a couple of simple circuits you can build (with radio-shack parts bin stuff) to shift the level up.
-Adam
P.S. I had to take a step backwards with the Omnicopter. I had the epiphany that the reason I kept having to re-tune all my gains was that the throttle commands specify a fraction of the battery voltage to apply to the motors, not an actual thrust, so as the battery voltage drops all my control math stops working. As I’m sure you know, it’s totally obvious when you’re actually flying an RC helicopter (or is yours gas-powered?) that you keep having to bump the throttle higher and higher to keep hovering. It’s way less obvious when the helicopter is on a test stand and you have no real idea of what the computer is telling it to do. I don’t have actual rotor speed feedback, but I am reading the battery voltage, so I spent the past two weeks fitting a logarithmic curve to the PWM duty cycle-motor speed-battery voltage relationship. Now I need to re-tune all the lateral control gains one last time, and I’ll be ready to try computer throttle control later this week.
On the transmitter module, do I need to step down the voltage from 5 to 3.3? I thought I did until reading this again. See the high lighted text.
Phil
Yeah, the transmitter will work just fine with a straight 5V input signal. From the “Absolute Maximum Ratings” section, it will consider anything below 0.2V low, and anything above 2.0V high, and as you spotted it can explicitly handle 5V inputs.
I’m using two transceivers in the Omnicopter, so they’re both transmitting and receiving. One is connected to a 3.3V USB to Serial Adapter (from Pololu of course) and the other is connected to an ATMega168 on a Baby Orangutan (the same microcontroller as on your Arduino) running at 5V. They all understand each other perfectly.
-Adam
Hay
I want to use wireless connection to and to replace the RX TX cables going from my orangutan to the pololu serial adapter. can I use this? it is cheaper and I will only use one side communication.
Arbel
Cheap-o serial radios are kind of a crap-shoot. That looks like it would work, but its also a little sketchy.
Its just transmitting high-low pulses in real time, as in the signal is either on or off, which is how Morse code was transmitted over radio (no error checking or nice things like that) which would be susceptible to radio interference. I’m also a little put off by the fact that they don’t seem to specify supply or working voltages anywhere. Also it’s limited to 9600 bps, and as you note, you can only transmit one way with it.
On the other hand, it is quite cheap, and there is a good chance it will do what you want it to do just fine. If you do get one I would love to know how it worked out. Out of curiosity, what are you planning on doing with it?
-Adam
I got a handy caped friend, he is in a wheel chair and need some one to assist him all the time. I want to design a robot that will be controlled with his laptop. the robot will basically be a big mobile arm. for that meter I need the serial adapter to communicate with the robot wirelessly. thats about it…
From your answer, I didn’t understand if I should get that part or not…
Arbel
I haven’t used that radio specifically, but I have had some bad experiences with that kind of super-cheap basic radio. On the other hand, it might do the job for you just fine, and if it doesn’t you haven’t wasted much money to find out.
In my own projects I like to use the LPRS Easy Radio Modules, some of which are also stocked by RobotShop.us (but they don’t seem to have any of the cheaper one-way pairs). I’ve never had any trouble with mine, but as you can see earlier in this thread, they’re a little more complicated so that can be another source of trouble. They’re also an order of magnitude more expensive. At work I use more “professional grade” digital radios, which are another order of magnitude more expensive, and way more complicated to configure, but once you get them working they’re pretty awesome.
I guess what I’m saying is that its your choice, and trying to give you some pros and cons. That does sound like an awesome project!
-Adam