
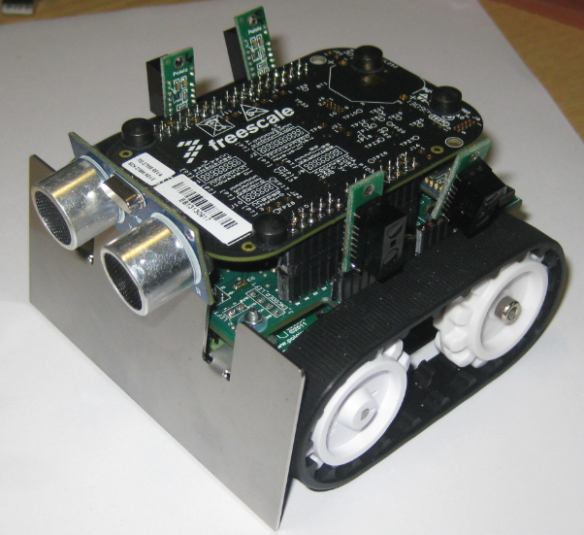
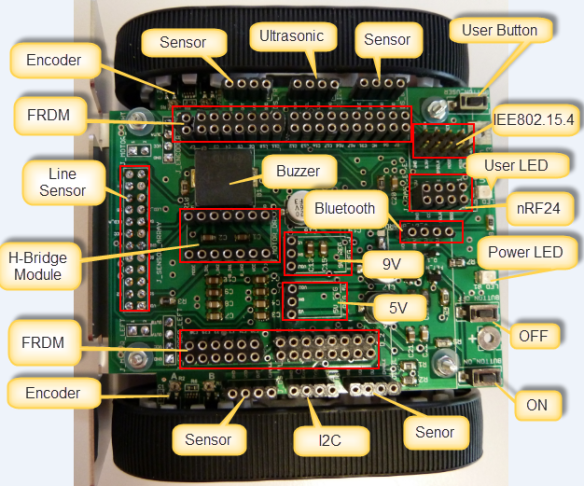
Finally the boards arrived and we have built the first Zumo Robots based on the Zumo chassis and plug-in Pololu modules.
Compared to the original Pololu Zumo robot, this one has
[ul]
- 9V DC motor voltage
- 3.3V logic levels, with DC/DC converters for additional 9V and 5V
- 32bit ARM Cortex-M0+ processor
- Wireless communication (Bluetooth, nRF24 from Nordic Semiconductor, SMAC/IEEE802.15 from Freescale)
- quadrature/position encoders
- ultrasonic sensor
- extra I2C connector
- up to 4 additional digital sensors on the sides
[/ul]
Pictures:

More details and schematics information:
http://mcuoneclipse.com/2013/10/06/zumo-robot-assembled/
Have fun ![]()