I am using your carrier(s) for the moment. I intend to replicate them on my own board and combine it with the Arduino and a gyro as well.
(side note, please separate the invert signal on the dual carrier, otherwise not usable in 2 pin (pwm+dir) mode)
Thanks for your feedback. We have heard that recommendation before, and we plan to separately break out those pins for the next revision of that carrier.
I have not followed up in a while, too busy having fun.
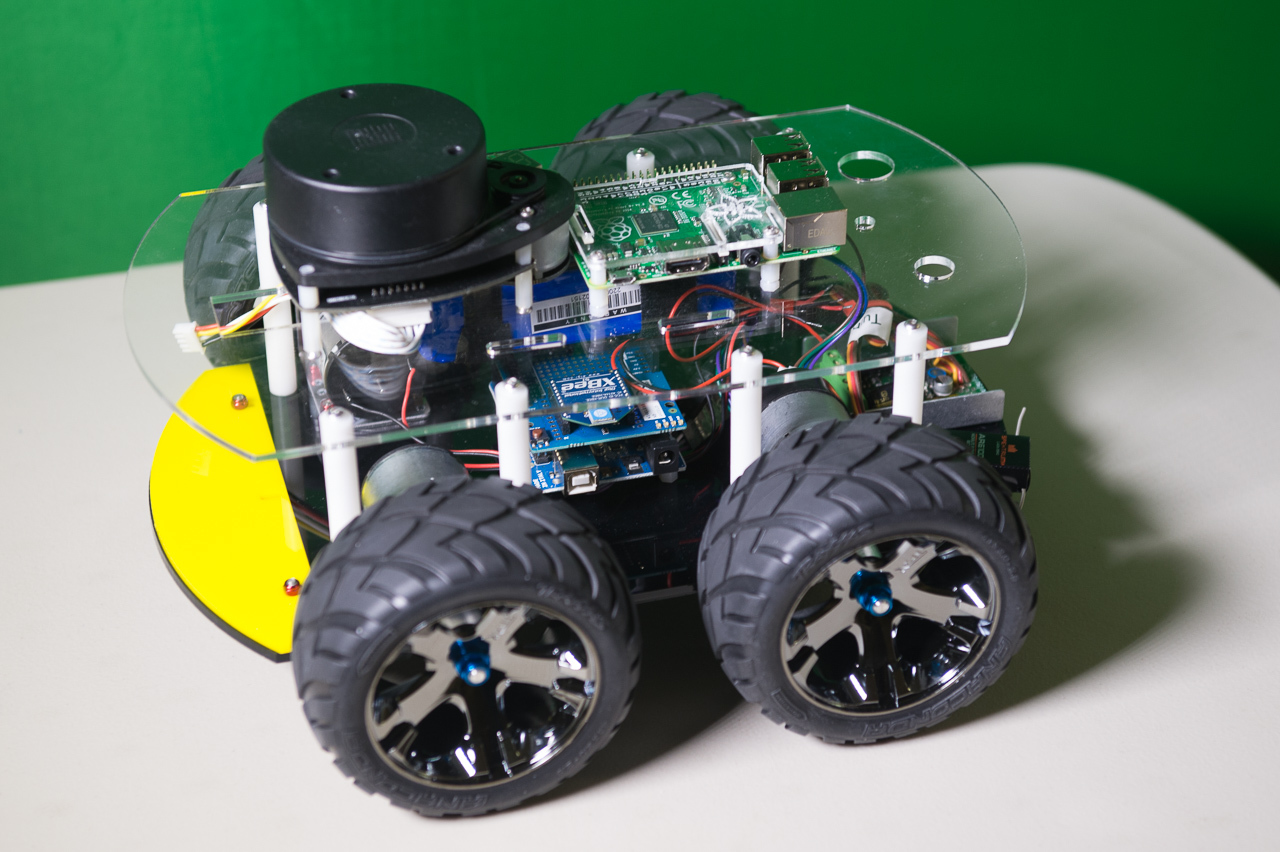
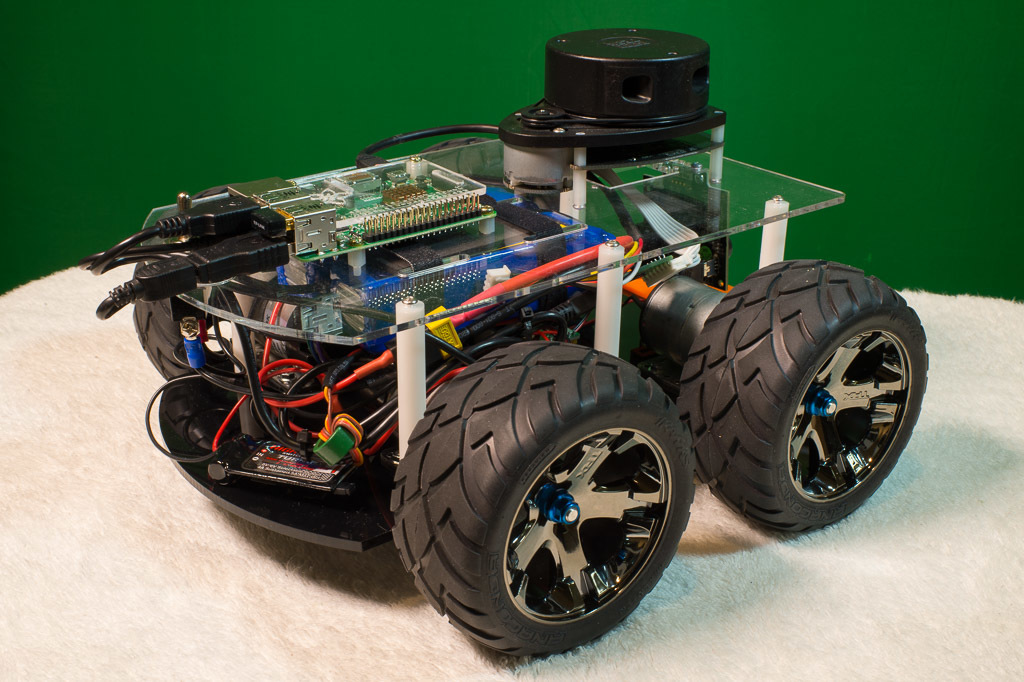
2 X encoded 185 RPM geared motors, 2 regular non encoded 185 RPM geared motors
2 X 33926 speed controllers
mpu 6050 using DMP mode for AHRS / IMU
All on a custom prototype Arduino shield
Raspberry Pi 2 B
RpLidar LIDAR
PIXY Cam
2 X 2200 mah 3S Lipo
Dead on accurate navigation. Full internet connectivity.
PID tuning: