Hi!
For the second year, I am participating to the French qualifications for the amateur robotics competition Eurobot with my team “XD”, and I am very happy to count Pololu as one of our sponsors ![]()
In short: 2 autonomous robots on a 2.1x3m playing field, the one scoring the more points is awarded the victory. Penalties can be given for robots that collides with the adversary or is not fair-play (so no smashing, no trying to incapacitate the other, etc; they have to be civilized ![]() ).
).
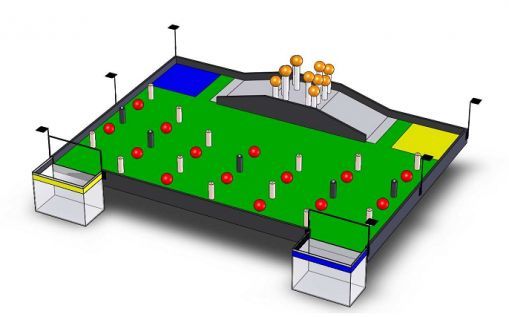
This year, the competition is entitled “Feed The World” and the robots have to collect red balls (tomatoes), orange balls (oranges) and white cylinders (ears of corn) and to put them in a basket to score points. To add to the difficulty, the oranges are located on “trees” accessible only by climbing a slope, and some of the cylinders are selected to be replaced by black ones, fixed to the table.
You can see the rules in english here.
The typical robot in this competition is a big box of 30x30x35cm, moving with two independently driven wheels and some ball casters.
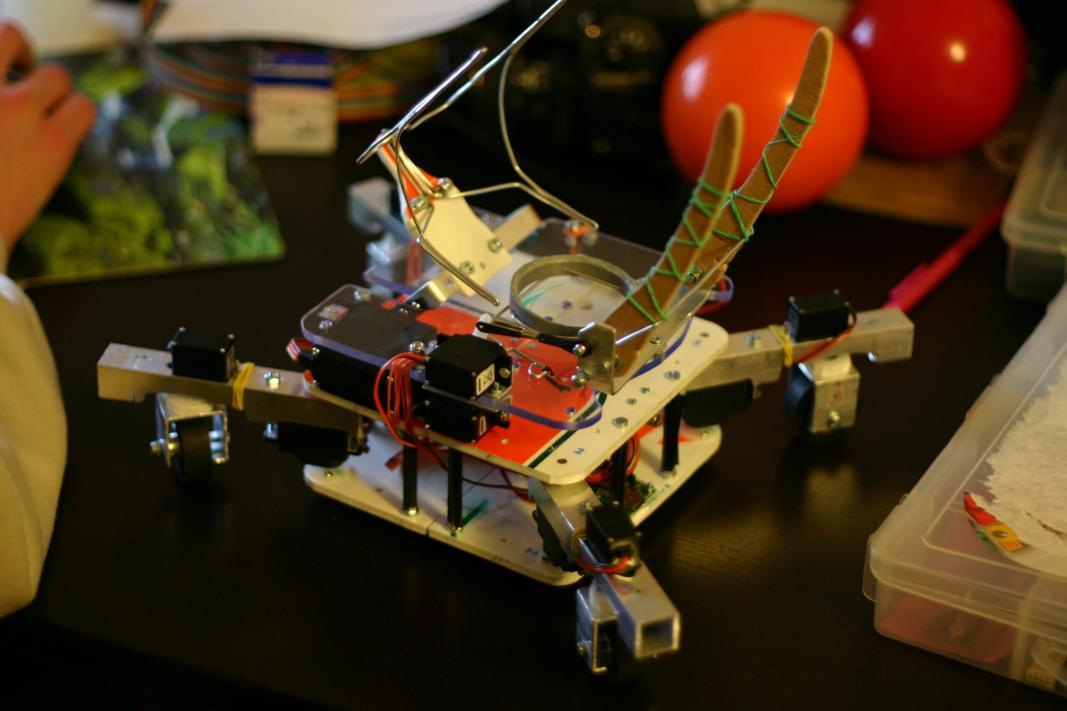
My goal is to try something unusual by presenting a robot that looks nowhere near a box, and moves by skating. I don’t intend to rank very high, it’s more for the fun.
The two-legged prototype looked like this :
http://www.youtube.com/v/IThFX8XpAek
But this one can move like a car would do, no turning on the spot, or sideways movements… so I had to make a four-legged version. This one can translate in any direction and rotate around any point in the plane (even if some movement are more tedious than others ^^ ):
Have a look at its first movements!
http://www.youtube.com/watch?v=2Vf6lhof93U
This version uses a Pololu Micro Serial Servo Controller, controlled by an Arduino Duemilanove. An xbee is used to program the Arduino remotely and to ask for different movements. Some work is needed to enable smooth transition from a movement to another.
For now, the servos are cheap Chinese Eurgle 16g for the legs, and Eurgle 8g (fast version) for the wheels. I selected the Solarbotics Large Rubber Wheels for their insane amount of grip, and they are mounted to turn freely on their axis. The legs are made from 16x16mm square aluminum tubes, and the wheel support, 25x25mm square alu tube. The body is cut in what seems to be extruded pvc, not sure.
I am currently working on upgrading the servo controller to a solution using two Micro Maestro 6-Channel USB Servo Controller, to have smoother movements and to decrease the time used to send the commands for the 8 servos to the controller.
This is only the beginning of the project. I have to turn this… moving thing into a fully autonomous robot, able to score points and avoid a moving opponent. For that, I am working on adding sensor (IR, sonar range finders, gyro, contact…), a camera, and some more processing power (it will use 2 or 3 Arduinos + a cmucam3). I will detail the solution for interacting with the game elements in another post, when it is ready ![]() .
.
The home of the project : http://xevel.fr (in French)
More videos: http://www.youtube.com/user/XeveL2
More photos: http://xevel.fr/gallery2/main.php?g2_itemId=972
All code freely available at http://www.assembla.com/spaces/XD_DSbot