
Tom;
I’m sitting here thinking about your project and was wondering if you had a picture of your setup. I assume the jitter is in tilt more than pan? And how much tilt do you want and how big is the camera? I can’t help on the electronics end, being a newby and all, but I’ve been a machinist since the Beatles so maybe I can offer some suggestions. Most servos I’ve played with will vibrate if held under load so maybe designing some kind of counterbalance is all that is really needed. Or a different type of drive for the tilt like a screw driven by a continuous rotation servo. Like a ball screw except more basic like the adjustment screw on steering linkage on an RC car. That would put the load on the screw and nut and not on the servo. If the linkage is loose you could build a friction brake into the pivot linkage or even just tighten the pivot up with a screw and nut. Don’t know what they are using for a pivot pin. I’m sure there are lot’s of other pan and tilt mechanisms out there that would be easier to adapt but I don’t know your situation. The camera on the 6 x 6 is one of the projects I want to get to eventually and how the servos handle the offset load has been a question I’ve wanted to ask someone.
Thought I would throw in my 2 cents worth in…
Neil
Hi Tom.
I’m sorry to hear about your family emergency. I hope everything is ok.
Have you tried relaxing the RC pulse requirement settings? These are located under the advanced settings tab. For example, you could try decreasing the “consecutive good pulses” setting to one or even zero, and you can also try making the “bad signal timeout” setting a bit longer. This wouldn’t fix the noise problem, but it would make the SMC more forgiving of a noisy RC input, which might be good enough.
- Ben
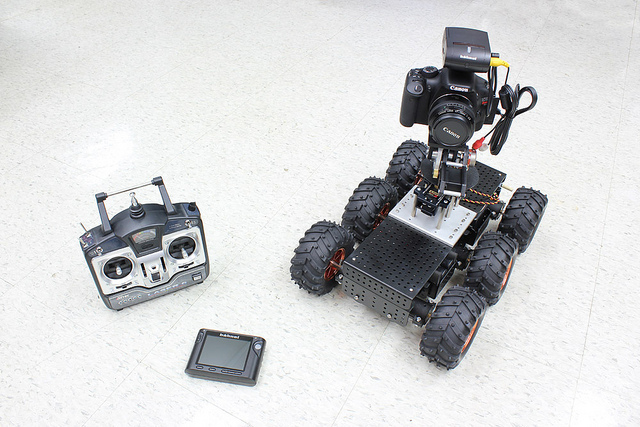
Here’s the overall shot:
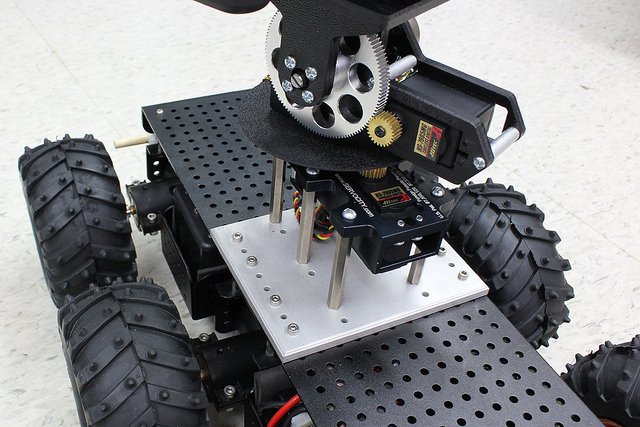
And here’s a close-up of the pan/tilt head from Servo City and the baseplate I made for it:
It puts a lot of weight up high, just the way it looks, but the amazing thing is the Dagu really does not want to tip over. At all. I stuck a dummy weight on top in place of the camera and tried shoving it over. It went past 45 degrees, but still it flipped right back when I let go. Despite the mass of the camera and how high it is, most of the mass is still in the Dagu. The CG is quite low.
The Servo City head is robust, but its basic design makes it difficult to add a counterbalance to. Right now the camera can tilt +/- 45 degrees from horizontal. I don’t know what’ll actually be needed once it’s put into service. It might be possible to shave that and keep it from hitting those extreme angles. In retrospect I wish I’d built it more along the lines of the rig I use for kite aerial photography, which is built as a gimbal that pivots around the center of gravity of the camera.

Same model camera, different lens, and the thing will run for hours on a 4xAAA pack since the balanced rig means there’s never any real draw on the servos.
Ben, I’ll try relaxing the RC pulse settings the next time I work on it (hopefully later this week). I’m also going to put the whole thing on a scope to see what’s happening with the radio. I’ll be curious to see if the servos are drawing enough off the power rails to cause the regulator to dip.
Do you know if the Dagu motors are filtered at all? They might be generating enough EMF to glitch the radio. I can open up the drive units and add filtering caps if you think this would help.
Thanks,
Tom
I’m not sure how representative this is, but I took a motor out of the first Wild Thumper sample we received and there were no external filtering caps. I don’t know whether there are any inside the motor case. I think you should first use a scope to get a better sense for what’s going on. If it seems like motor noise infiltrating the rest of the system, then adding some caps across your motor terminals would probably help.
- Ben
That sounds like a reasonable plan. So here’s what’s on my hit-list:
1 - Put it on a scope and see what’s going on with the power and signal lines.
2 - Clean up my antenna placement, see if I can get it clear of the rest of the robot.
3 - Uncable all the power stuff, twist the leads, and re-cable to try to minimize the induced magnetic fields from those.
4 - See how much if this is coming from the servos on the pan/tilt and filter those if possible (those cables are already twisted).
Past that, see if I can get another 75MHz radio that doesn’t suffer as much from whatever is going on. But I’d like to see what each of these changes does one at a time before I go that route.
Tom
P.S. As a follow-up on that photograph of my DSLR KAP rig: A while back I did some experiments using a Baby-Orangutan as an automatic camera rig controller. The big claim to fame with that setup was being able to dial in an acceleration for each axis to control oscillation at the end of a move. Roll the clock forward, you guys released the Maestro servo controllers. What a boon to the kite aerial photography community! A couple of people have now built autoKAP controllers using Maestro servo controllers. They work great. And the acceleration is part of the package deal. Pololu delivers again! Way to go, guys.
Well… I’m not there yet.
I cleaned up the antenna placement, twisted the motor leads, removed the pan/tilt head, and still had limited range with the 75MHz surface radio gear. The 2.4GHz radio gear had no range issues. I still haven’t put the whole thing on a scope, but some other tests I did are beginning to convince me that the 75MHz radio gear may not be well suited to this.
So while I’m still trying to sort through this, here’s another question: I’ve seen people do FPV setups with 2.4GHz RC gear and 900MHz video downlink. I’ve also seen 72MHz RC gear and 2.4GHz video downlink. For this project I’m more or less stuck with a 2.4GHz video downlink, and the 75MHz ground radio isn’t working. Are there other radios I could look at that would work as well?
Here’s one I’m curious about, but haven’t seen: XBee makes 900MHz radio modems. Do you know if anyone has hacked one of these into an RC system? Here’s a possibility: Get a Funnel IO board + XBee 900MHz radio and swap out the guts on an RC transmitter to use this instead. Plenty of A/D channels, so reading all the user inputs shouldn’t be an issue. On the remote side get an XBee 900MHz radio and a Maestro servo controller. Treat the two XBees as a transparent link, with the FIO board talking to the Maestro over its serial port.
The only issue I have going this route is that I’m already rolling a fair bit of custom gear on this project. I’d rather not get too esoteric with the radio if I can possibly avoid it. Off the shelf would make me happier than custom. But if this is likely to give solid performance, I’ll do it.
Let me know what you think.
Tom
I’m sorry to hear that you’re still being held up by RC issues. Unfortunately, my general RC experience is limited to a few specific systems, and I haven’t had to deal with the kind of interference you are getting now, so I can’t really give much advice here. Perhaps you could try asking around on forums frequented by RC enthusiasts to see if there is a simpler solution than making your own radio?
- Ben
Good plan. I’ll try that next.
I have to say that so far I’m pleased as punch with the Dagu Wild Thumper. The only persistent issue I’ve run into is that the screws holding the wheels on do shake loose over time. But I think it’s a simple matter to drill a dimple on the flats on the motor shafts and secure the screws using blue Loctite. Other than that minor issue, it’s a solid performer. I’m eager to get this project wrapped up and out the door, but I honestly look forward to the next project I do that involves the Dagu and the Simple Motor Controllers. They make a great combination.
Thanks again for all your help!
Tom
Thanks for the idea to post on other forums, Ben. I did that, and the consensus was that something was wrong with the radio, not the Dagu or the ESCs. So I sent the Tx and Rx back to Hitec. Sure 'nuff the Rx was bad. They sent a new unit, and I’m back up and running. I did a range check with video feedback this morning, and it’s much MUCH better. Well over a hundred feet without dropouts so long as I have clear line of sight.
So next question, more closely related to the Dagu Wild Thumper:
Do you know if anyone has installed any sort of a sway bar on it?
Since this is for holding a camera, it’s preferable to have vaguely level horizons when the thing is on a level surface. This won’t be as big a deal when it’s going over rocks, but it does tend to list to one side or the other. I looked at a couple of after market sway bar kits for offroad RC trucks, and it looks like any number of them could be adapted to the Wild Thumper with a couple of extra bits thrown in (like bushing blocks to mount to the front and rear to hold the sway bar). I don’t mind fabricating the blocks, but if someone else has already done the work, I’m all for off-the-shelf.
I’m still on the fence whether this is a good idea or not. A lot of what makes the Wild Thumper well suited to this application is its ability to rock scramble. I did some tests with vertical faces, and because the suspension is so loosey goosey, you can drive up to a vertical face that’s taller than the wheels on the Wild Thumper, and so long as you approach it at an angle, the first wheel to touch will crawl its way up the face to the top, and pull the rest of the wheels up after it. This lets it go through doorways with a raised sill, up and over large tree roots like the ficus trees I’ve been testing it on, and lets it scramble over all sorts of large rocks. I’m a little concerned that adding the sway bars will compromise this. But I’m willing to try and find out.
Thanks again,
Tom
That looks like a nice system Tom. Can I ask, do you have any issues with the middle wheels being mounted lower than the end wheels? I’m thinking about on a flat surface, like a parking lot.
Anyone else care to comment?
Thanks a lot,
Colin
Nope, I didn’t have any problem with the lower mounting of the middle pair of wheels. Actually, it was several months before I even figured that out! They just seemed to have more outside camber than the others. (DUH!)
It works out pretty well. The center wheels are set lower and have stiffer springs, so they support most of the weight. The front and back wheels have less spring force, and are mounted higher, so they provide more of a corrective moment than they do actual support. It makes it very agile on the ground.
A parking lot is not ideal for steering on the 6WD Dagu. Carpet is another one it struggles with. It fares a lot better in loose dirt and sand. You CAN navigate on hard surfaces, but you can’t spin in place. The tires grip too much. But if rather than going full-reverse / full-forward to turn you go dead-stop / full-forward, it does better.
I really can’t find much negative to say about the Dagu Wild Thumper platform. Combined with the Pololu Simple Motor Controllers, it’s a natural base for just about any kind of robot. The only possible negative I can point to is that it uses metric screws. Which isn’t an issue at all if you don’t lose them! But I stock metric and SAE, so it was a total non-issue.
Tom
P.S. Unfortunately (for me, anyway) I’ve delivered this system to its rightful owner. So I can’t provide any more photos or videos. The only modification we’ve got in the works is to replace the pan/tilt head with a balanced pan/tilt/yaw gimbal head.
Thanks Tom. I have the same problem with the tilt on my mini cam at extreme angles. I’m going to make a balanced rig where the servo isn’t all the time working to hold the camera up.
On your interference issues, there’s some things you can do to begin with:
-
Get the video transmitter antenna as far away as possible from RC receiver antenna. Regardless of what the frequencies are.
-
Power the drive system and the video system from separate battery packs.
-
If you’re using a switching voltage regulator for the vid system, make sure it’s a filtered one.
I’ve got help from Tim at ReadyMadeRC ( tim@readymaderc.com ). He’s a good guy and won’t try to sell you something that won’t do any good.
Cheers,
Colin
Given the discussion, I thought you might find this interesting:
burrard-lucas.com/beetlecam
It is a wild life camera on a Wild Thumper in Africa.
Regards,
Michael
I am thinking of buying a Wild Thumper for a project that require lots of sensors and a huge battery so is there any recommendation on how to make the Wild Thumper safely pull more than the given advised 11lb in the description? I am thinking the Wild Thumper will need to pull about 15-20lbs of hardware.
Thanks in advance!
Jonn
Unfortunately, since we did not engineer the Wild Thumper, we cannot provide much advice. I suspect stiffening the suspension might help, but we haven’t tried it in practice. It might be worth it to visit this Let’s Make Robots blog, posted by the designer of the Wild Thumper.
-Ken